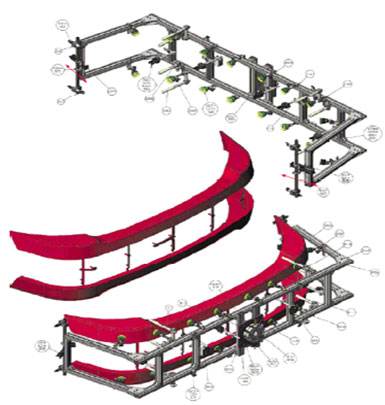
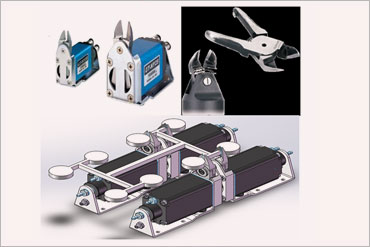
It is the hand (with all necessary tools) of the robot used to unload the injection moulding machine.
Job of a EOAT
- To take the moulded part out of the mould;
- To grip it firmly;
- To separate the moulded part from the sprue;
- To grip the sprue after cutting;
- To drop the sprue in the recycling machine;
- To unload the moulded part onto a pallet/belt.